

- Introduction au fonctionnement des actionneurs
- Mécanismes de rétroaction positionnelle
- Types de systèmes de commande pour actionneurs
- Commentaires et correction des erreurs
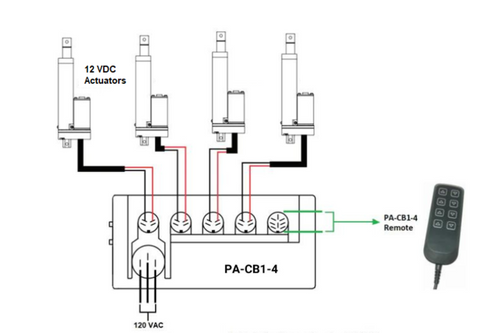
- Boîtiers de commande pour actionneurs linéaires
Introduction au fonctionnement des actionneurs
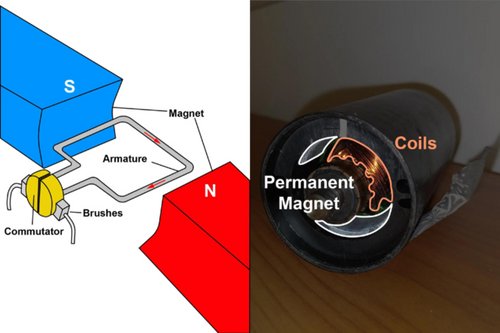
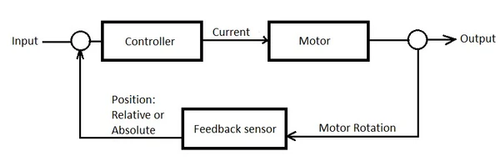
Dans actionneurs linéaires électriquesLe courant électrique est utilisé pour produire un mouvement de rotation dans un moteur électrique qui est mécaniquement relié à une boîte de vitesses et utilise un lead
screw pour faire fonctionner l'arbre de l'actionneur fixé à un ACMÉ Écrou de perçage pour mouvement linéaire. Les systèmes de commande des actionneurs ont considérablement évolué au fil des ans, améliorant la polyvalence et la fonctionnalité de ces dispositifs. Les actionneurs linéaires peuvent être actionnés par divers moyens et mécanismes de commande, notamment :
• Manettes sans fil – offrent aux utilisateurs la commodité d'une commande à distance sans avoir besoin de câbles physiques.
• Manettes compatibles Wi-Fi et Bluetooth - permettre l'intégration dans les systèmes intelligents et l'accès via les appareils mobiles, offrant des interfaces conviviales et la possibilité de régler les paramètres à distance et avec précision.
Ces progrès dans la technologie des actionneurs et les systèmes de commande ont élargi le champ de leurs applications, les rendant indispensables dans les systèmes automatisés modernes. Qu'il s'agisse de régler les fenêtres… véhicules, fonctionnement de charges lourdes matériel agricole, ou automatiser les appareils ménagersLes actionneurs restent essentiels pour traduire les signaux électriques en action physique.

Comprendre les systèmes de commande des actionneurs
L'objectif principal de ces systèmes est de garantir un fonctionnement précis, efficace et fiable des actionneurs, conformément aux paramètres prédéfinis. L'importance des systèmes de commande dans le fonctionnement des actionneurs est capitale, notamment pour un contrôle précis et efficace des mouvements. Ces systèmes sont essentiels pour plusieurs raisons :
1. Précision : Les systèmes de contrôle permettent un réglage fin des mouvements des actionneurs afin d’atteindre des niveaux élevés de répétabilité et de précision. Ceci est essentiel dans les applications où un positionnement précis est critique, comme en chirurgie robotique ou en ingénierie aérospatiale.
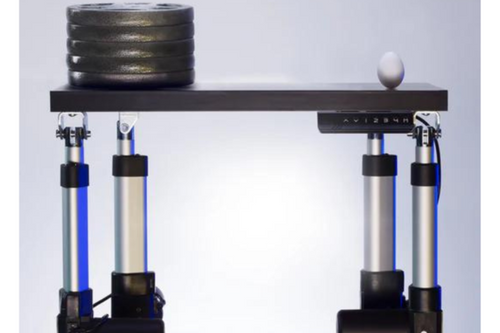
2. Efficacité : En optimisant la réponse des actionneurs aux commandes, les systèmes de contrôle réduisent la consommation d’énergie et minimisent l’usure. Cela prolonge non seulement la durée de vie de l’actionneur, mais améliore également l’efficacité globale du système dans lequel il fonctionne. Adaptabilité : Les mécanismes de rétroaction peuvent ajuster en temps réel le comportement des actionneurs compatibles en analysant les données de position qu’ils reçoivent. Cette adaptabilité est essentielle dans les environnements dynamiques où les conditions évoluent rapidement, comme dans les processus de fabrication automatisés ou lorsque plusieurs actionneurs subissent une répartition de poids inégale.
5. Dispositifs de sécurité : Les dispositifs de sécurité programmés, tels que la protection contre les surcharges, contribuent à prévenir les dommages à un actionneur ou à l’application en interrompant le fonctionnement lorsque le boîtier de commande détecte une consommation de courant excessive. Une autre fonction de sécurité présente dans les boîtiers de commande est la protection contre la surchauffe. Celle-ci interrompt le fonctionnement après un certain nombre de cycles afin de garantir que le fonctionnement reste dans les limites du cycle de service nominal de l'actionneur et d'éviter ainsi la surchauffe du moteur. Les systèmes de commande sont essentiels au fonctionnement des actionneurs. Ils fournissent l'intelligence et l'adaptabilité nécessaires pour assurer la précision, l'efficacité, la sécurité et un contrôle de mouvement performant. Leur rôle est primordial dans le domaine en pleine expansion des technologies d'automatisation, où la précision du mouvement est souvent la clé du succès opérationnel.
Composants et types de systèmes de contrôle
Composants clés d'un boîtier de commande de base
Dans un boîtier de commande de base conçu pour les actionneurs linéaires électriques, chaque composant joue un rôle crucial pour assurer un fonctionnement efficace. Voici une description détaillée des principaux composants, de leurs fonctions et de leur utilité :1. Relais : Les relais fonctionnent comme des interrupteurs qui commandent le circuit électrique haute puissance à l’aide d’un signal basse tension. Pour les boîtiers de commande conçus pour gérer des actionneurs à deux fils, deux relais sont indispensables pour inverser la polarité de la tension appliquée aux deux fils de l’actionneur, ce qui modifie le sens du mouvement. Ceci permet une commande bidirectionnelle simple pour déployer et rétracter l’actionneur.
2. Canaux d'entrée : Les canaux d'entrée sont des interfaces permettant au système de commande de recevoir des signaux électriques provenant de sources externes, telles que des alimentations ou des télécommandes filaires. Les boîtiers de commande à retour de position peuvent également recevoir des données des capteurs d'un actionneur. Ces canaux traitent les entrées de l'utilisateur et/ou des capteurs afin de déterminer le mode de fonctionnement de l'actionneur. Ils sont donc essentiels pour initier et contrôler les mouvements de l'actionneur en fonction d'exigences spécifiques.
3. Canaux de sortie : Les canaux de sortie transmettent les signaux de commande du contrôleur à l'actionneur ou à d'autres composants, comme des relais. Les boîtiers de commande à retour de position peuvent également fournir un courant électrique pour alimenter les capteurs de l'actionneur. Ces canaux sont indispensables à l'exécution des commandes définies par le système de commande et influencent directement le comportement de l'actionneur.
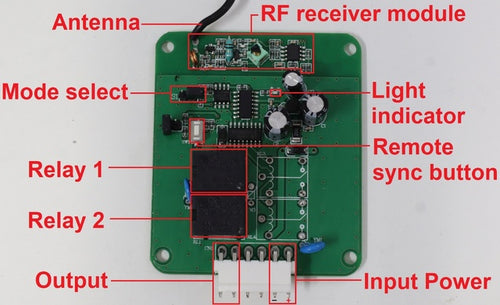
4. Bouton de synchronisation à distance : Ce bouton permet de synchroniser le système de commande avec une télécommande. Il garantit la reconnaissance et le traitement des entrées de la télécommande par le système de commande, pour une utilisation simple et flexible. à distance.
5. Voyant lumineux : Les voyants lumineux fournissent un retour visuel sur l’état du système. Ils peuvent indiquer la mise sous/hors tension, les modes de fonctionnement, les erreurs ou la réception du signal, facilitant ainsi la surveillance et le dépannage du système sans outils de diagnostic complexes.
6. Sélection du mode : Cette fonction permet à l’utilisateur de basculer entre différents modes de fonctionnement du boîtier de commande, tels que les commandes momentanées ou non momentanées. En mode momentané, le bouton de la télécommande doit être maintenu enfoncé pour que l’appareil fonctionne. Dès que vous relâchez le bouton, l’appareil s’arrête. Le mode non momentané fonctionne comme un interrupteur qui reste dans sa dernière position jusqu’à ce qu’il soit modifié, qu’il soit enfoncé ou non. Cela signifie qu’une fois activé, l’appareil continue de fonctionner jusqu’à ce que l’interrupteur soit éteint manuellement.
7. Antenne : L’antenne fait partie des boîtiers de commande dotés d’un système de communication sans fil. Les antennes servent à améliorer la portée et la qualité du signal entre le système de commande et la télécommande. Il est essentiel de maintenir une communication robuste entre les dispositifs de commande ou entre les systèmes interconnectés, notamment dans les environnements où le câblage direct est impraticable ou indésirable.
8. Module récepteur RF : Ce module reçoit les signaux radiofréquences émis par les télécommandes sans fil. Il décode ces signaux en commandes exploitables par le système de contrôle. Le module récepteur RF est indispensable aux configurations de commande sans fil, permettant ainsi le fonctionnement à distance de l’actionneur sans contact physique. Ensemble, ces composants forment un système de contrôle complet pour les actionneurs à 2 fils. Chacun remplit une fonction spécifique contribuant à l’efficacité globale du fonctionnement de l’actionneur. Ce système permet non seulement un contrôle précis des mouvements de l’actionneur, mais améliore également l’interface utilisateur et l’interaction, le rendant adaptable à une large gamme d’applications.
Mécanismes de rétroaction positionnelle
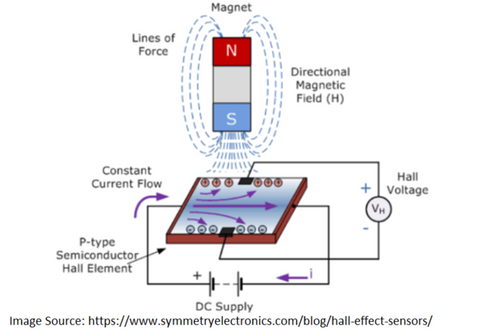
capteurs à effet Hall
La théorie de l'effet Hall, découverte par Edwin Hall, stipule que lorsqu'un champ magnétique est appliqué perpendiculairement au courant électrique dans un conducteur, une différence de potentiel est induite. Cette différence de potentiel permet de détecter la présence d'un aimant à l'aide d'un capteur à effet Hall.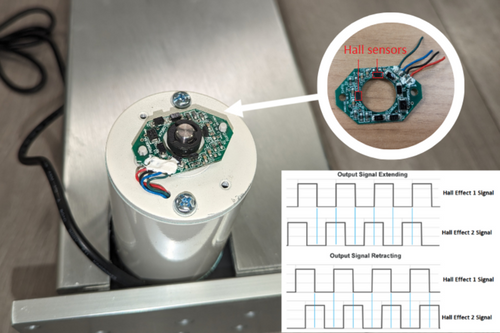
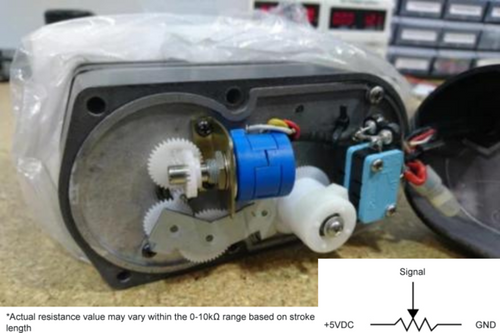
Potentiomètres
Un potentiomètre offre une résistance variable proportionnelle à la position de l'actionneur. Des engrenages relient généralement le bouton du potentiomètre au moteur rotatif de l'actionneur. Lorsque l'actionneur se déplace, la valeur de la résistance varie, ce qui permet de la mesurer et de la convertir en données de position. Ces informations sont ensuite utilisées par un système de commande pour ajuster finement la position de l'actionneur et ainsi améliorer la précision.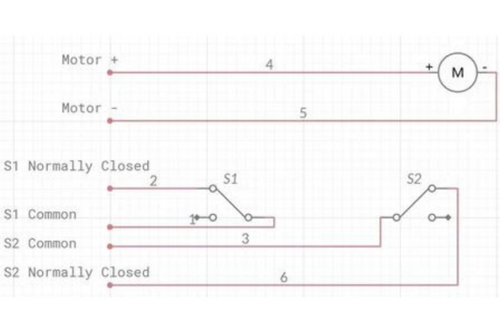
Retour d'information du commutateur de fin de course
Le rôle des signaux de retour d'information des interrupteurs de fin de course est de permettre à un système de déterminer si l'actionneur a physiquement déclenché les interrupteurs de fin de course internes. Ce type de retour d'information est simple et utile pour les applications qui nécessitent principalement de savoir si l'actionneur a atteint sa position complètement déployée ou complètement rétractée.Types de systèmes de commande pour actionneurs
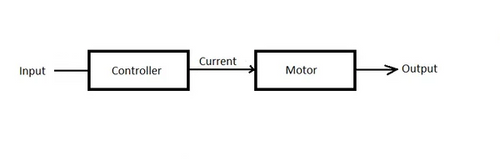
Un exemple de système simple en boucle ouverte comprend un interrupteur à bascule momentané relié à un actionneur linéaire. L'opérateur doit alors maintenir l'interrupteur enfoncé pour que l'actionneur continue son cycle ; relâcher l'interrupteur avant que l'actionneur n'ait atteint la fin de sa course interrompt son mouvement.
Le choix du système de commande et de ses composants influe considérablement sur la fonctionnalité et l'optimisation des performances des actionneurs. L'intégration de mécanismes de rétroaction efficaces et la sélection du type de système de commande approprié permettent d'optimiser les actionneurs pour une large gamme d'applications, garantissant ainsi précision et fiabilité de leur fonctionnement.
Commentaires et correction des erreurs
Variables corrigées par les systèmes de commande
1. Position : Les systèmes de commande garantissent qu'un actionneur atteint et maintient la position souhaitée avec précision en comparant la position de l'utilisateur à la position réelle mesurée par les capteurs de retour d'information. Par exemple, lorsqu'un utilisateur de bureau assis-debout appuie sur un bouton de commande pour que les actionneurs se déplacent vers une position mémorisée spécifique et ajustent ainsi son espace de travail de la position assise à la position debout.
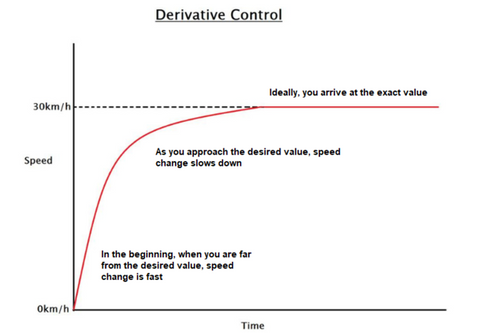
2. Vitesse : La vitesse de déplacement est calculée en divisant la distance parcourue par le temps écoulé à partir du retour d'information de position. Certains systèmes de commande permettent un réglage de la vitesse par modulation de largeur d'impulsion (PWM), permettant ainsi à l'actionneur de se déplacer à différentes vitesses selon les besoins de l'application. Ceci est utile dans les applications nécessitant des vitesses variables, comme pour les actionneurs pilotant les simulateurs de vol. 3. Force : Certains systèmes de commande peuvent réguler la force exercée par les actionneurs, garantissant ainsi un fonctionnement sûr et évitant d'endommager le système ou les composants environnants. En mesurant la consommation de courant électrique, les systèmes de commande peuvent évaluer approximativement la force exercée par les actionneurs linéaires. Cette fonctionnalité est utile pour les actionneurs linéaires d'ouverture et de fermeture de fenêtres : elle permet de couper l'alimentation et d'arrêter l'application de la force si une main ou un obstacle bloque le passage.
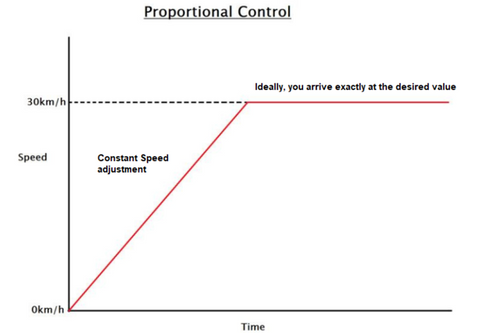
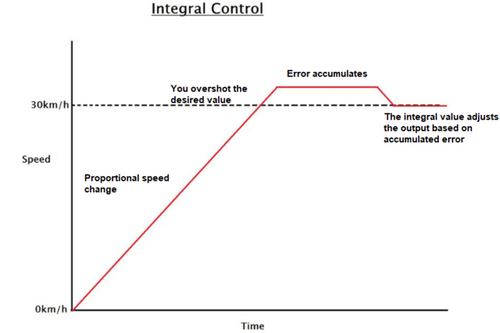
Types de stratégies de contrôle
Choisir le bon système de contrôle
• Ingress Protection
• Compatibility
• Budget
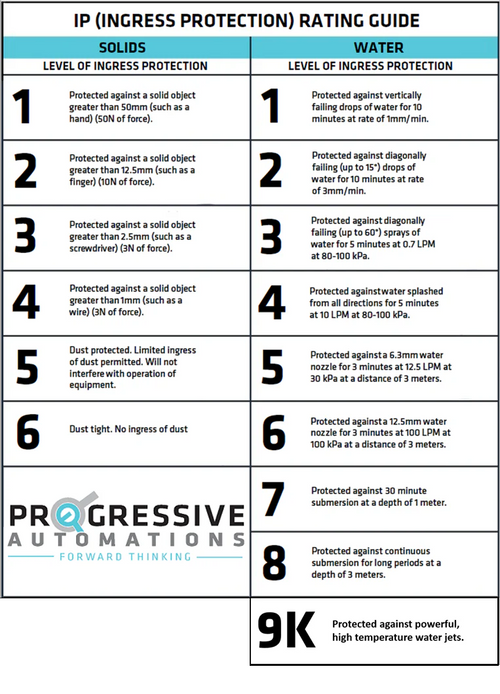
1. Ingress Protection: Assess the specific environmental requirements of your application to determine the type of control systems needed. The PA-33 control box for example has an ingress protection rating of IP65 for dust and water resistance. An ingress protection rating of IP65 or higher is recommended for control systems exposed to outdoor elements such as rainwater, dust, and debris. 2. Compatibility: Ensure that the control system is compatible with the electric linear actuators you have chosen or are currently using to ensure seamless integration. Check if your actuator has the matching communication protocols/positional feedback to the controllers you were considering. For example, the PA-12-T (TTL/PWM) and PA-12-R (RS-485) Micro Precision Servo Actuator provide precise position control with positional accuracy up to 100 um and require advanced communication protocols for such performance. Another thing to consider is whether the type of motor your actuator has will be compatible with a control system. Continuously operating brushless motors such as those found in our custom ordered PA-14 actuators would require control boxes compatible with their operation such as the LC-241 control box. To see which of our control boxes and actuators are compatible with each other, check out our control box comparison and compatibility charts linked below: https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Compatibility%20Chart%202023.pdf https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Comparison%20Chart-1.pdf 3. Budget: Consider if there were any budget constraints for the project and choose a control system that offers the best value for your investment while meeting your performance requirements. For example, simple indoor projects that do not require high precision would work without any issues by wiring a basic rocker switch without high ingress protection to control a 2-wire mini linear actuator at an affordable price.

Boîtiers de commande à effet Hall
Pour plus d'informations, consultez notre blog sur les applications des boîtiers de commande FLTCON.
