L'utilisation des toilettes fait partie intégrante du quotidien. Cependant, les personnes à mobilité réduite, blessées ou handicapées peuvent trouver l'utilisation des toilettes standard difficile. Les toilettes standard peuvent parfois être équipées de rampes ou de cabines plus larges, mais elles ne constituent pas une solution complète pour tous les utilisateurs à mobilité réduite. Le réglage de la hauteur et l'accessibilité des toilettes sont des points que les grands espaces publics pourraient améliorer. Ces solutions existent déjà, mais elles sont principalement utilisées dans les espaces privés à domicile et ne sont pas abordables pour une utilisation pratique dans les lieux publics. Dans cet article, nous abordons le parcours de l'équipe du banc d'essai de toilettes universelles RIT MSD pour développer des solutions abordables, rapides et faciles à installer pour les toilettes réglables, adaptées aux personnes à mobilité réduite.
Présentation de l'équipe
Également connu sous le nom de « A Toilet in Motion ! », le banc d'essai universel pour toilettes est un projet d'équipe réalisé par des étudiants du Rochester Institute of Technology dans divers domaines de l'ingénierie :
Robert Cho – Ingénieur mécanique et systèmes
Aubrey Figoras – Ingénieur mécanique et concepteur CAO
Chloé Cattadoris – Ingénieure industrielle et chef de projet
John Lowenhaupt – Ingénieur électricien et facilitateur
Zach Flickinger – Ingénieur électricien et systèmes
Manny Pizarro – Ingénieur mécanique et acheteur
L'idée initiale du projet a été lancée par Daniel Phillips et Stan Rickel, du LiveAbility Lab du RIT , qui cherchaient à créer des toilettes accessibles aux personnes à mobilité réduite. L'objectif était de développer des toilettes mobiles conformes aux normes ADA en position d'utilisation à domicile, mais également réglables en hauteur (manuellement et automatiquement) pour s'adapter aux besoins de chaque utilisateur. Sous la direction du programme de conception multidisciplinaire senior du RIT, l'équipe a consacré le premier semestre à identifier les besoins des clients, à comparer les produits existants et à élaborer une conception préliminaire du système.
Planification et conception du système

Le système mécanique a été conçu avec SolidWorks, tandis que les schémas électriques ont été réalisés avec Altium. Pour la conception mécanique, le support de toilette simple en fonte Watts ISCA-101-R IS a été choisi, capable de supporter des toilettes suspendues American Standard et d'une capacité nominale de 227 kg. La charge totale estimée comprenait le support de toilette (77 lb), environ 22,7 kg pour les toilettes et jusqu'à 159 kg pour une personne du 99e percentile.
La charge étant en porte-à-faux, la conception nécessitait des rails de guidage pour contrer le moment induit. Une analyse des contraintes réalisée par l'équipe a permis de déterminer que deux rails de guidage en acier au carbone 1566 de 1-1/2" de diamètre suffiraient à supporter la charge sans céder sous l'effet de la flexion ou de la fatigue.
Découpe des pièces en bois
La majeure partie de la construction a été réalisée dans l'espace de fabrication The Construct, situé sur le campus du RIT et dédié à l'accompagnement des étudiants dans leurs projets personnels et scolaires. Toutes les pièces en bois entourant le support de toilette, ainsi que le linteau et le pied du cadre, ont été usinées sur une fraiseuse CNC ShopSabre , en raison de la précision et de la complexité des perçages requis.
L'équipe a conçu un ensemble de planches de bois sur lesquelles le support de toilettes pouvait être fixé. Ces planches devaient également comporter quatre roulements à billes linéaires robustes pour coulisser sur les rails de guidage et fournir un espace pour le montage des actionneurs . Le matériau choisi était une planche de pin de 2,5 cm d'épaisseur provenant de chez Lowe's . À l'aide d'une défonceuse CNC, l'équipe a pu découper un panneau de pin de 2,5 cm d'épaisseur pour obtenir les pièces nécessaires au système de support de toilettes.

La structure du système a été réalisée en bois de 2 x 12, dont les montants latéraux ont été doublés pour plus de solidité. Pour ce cadre, l'équipe a conçu un linteau et un pied de page sur mesure, sur lesquels les rails de guidage seront fixés. Ces pièces usinées CNC, destinées au bas et au haut du cadre du banc d'essai universel pour toilettes, sont visibles sur la photo ci-dessous. La pièce supérieure constitue le linteau sur lequel seront fixés les actionneurs linéaires.

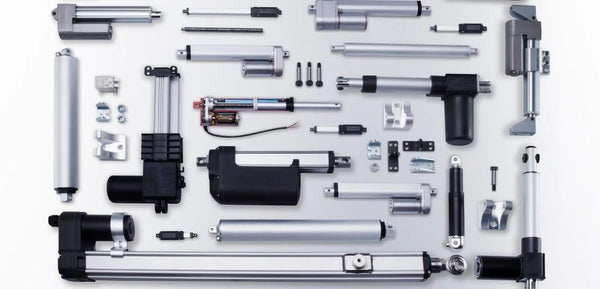
Choisir des actionneurs linéaires adaptés
Pour ce projet, les actionneurs linéaires ont été soigneusement sélectionnés en fonction de trois facteurs principaux :
- vitesse de déplacement
- capacité de charge dynamique
- longueur de course
L'équipe avait besoin d'une vitesse relativement élevée, mais également sûre pour l'homme, et d'une amplitude de mouvement d'environ 60 cm. Après de nombreuses recherches, le PA-17-24-850 s'est avéré être la meilleure option pour répondre à ses besoins. Bien qu'un seul actionneur aurait parfaitement pu supporter une charge totale de 227 kg, deux actionneurs ont été choisis pour assurer la redondance.

Le processus d'assemblage
Une fois toutes les pièces fabriquées et découpées aux longueurs appropriées, l'équipe a assemblé le système de support de toilettes. En enfonçant les roulements dans les planches de bois et en vissant les adaptateurs, l'équipe a pu « emprisonner » les roulements dans les planches usinées CNC.

Le reste du cadre a été découpé à la scie radiale et assemblé avec une perceuse à main et des vis. Les assemblages supplémentaires ont été réalisés à l'aide de boulons de 1/2" de diamètre, d'écrous nylock et de clés à douille.
Ensuite, un support de toilette COTS (commercial prêt à l'emploi) a été fixé entre les deux planches de bois CNC pour former un système de support de toilette assemblé.

Ensuite, les rails de guidage linéaires ont été insérés dans les roulements et des brides ont été fixées à chaque extrémité. L'équipe a ensuite assemblé le cadre autour du support de toilettes, les brides du rail de guidage étant fixées dans le linteau et le pied du cadre. Une fois cette étape terminée au sol, l'ensemble du système a pu être mis en place et fixé au mur à l'aide d'équerres en acier et de supports de fixation BRK-17 .

Les deuxactionneurs PA-17 ont été installés en dernier. Leurs trous de fixation ont été fixés auxsupports de fixation du cadre, puis ils ont été déployés sur toute leur longueur, puis fixés à la base du support de toilettes . Après une discussion approfondie avec le professeur et mentor de l'équipe, issu du programme de conception multidisciplinaire senior du RIT, il a été jugé inutile d'installer d'autres composants électroniques, outre l' interrupteur à bascule , en raison de la décision finale de ne pas mettre en œuvre le système de commande initialement prévu. Le banc d'essai universel pour toilettes, désormais équipé d'actionneurs PA-17 reliés à un interrupteur à bascule, est présenté ci-dessous.

Tests finaux et résultats
Finalement, l'équipe n'a pas pu implémenter les variateurs de vitesse AC-26-30 à temps, faute d'en comprendre le fonctionnement. Auparavant, l'équipe tentait de les faire fonctionner avec leurs dispositifs de commutation en entrée. Or, ces derniers doivent être en sortie pour fonctionner correctement. De ce fait, leurs variateurs fonctionnaient parfaitement dans un sens, mais l'inversion de polarité était inopérante. Faute de temps pour dépanner et repenser le système, l'équipe a dû abandonner cette fonctionnalité et utiliser un seul interrupteur à bascule pour le contrôle utilisateur.
Les contraintes de temps ont également empêché l'intégration du système électrique comprenant l'Arduino Uno et la RFID pour les hauteurs prédéfinies, qui sont restés pour l'instant purement théoriques. L'équipe a pu réaliser avec succès des tests de poids et de mouvement du banc d'essai universel pour toilettes, avec une charge appliquée de 159 kg, afin de vérifier son bon fonctionnement.

EN RÉSUMÉ
Malgré des difficultés telles que le manque de financement, de connaissances techniques et d'expérience industrielle, l'équipe du banc d'essai de toilettes universelles RIT MSD a finalement pu terminer l'assemblage de son projet. L'équipe est également reconnaissante d'avoir pu concrétiser les idées du LiveAbility Lab et remercie Mark Minunni pour ses conseils avisés et concrets sur le projet.
Merci à l'équipe du banc d'essai universel pour lavabos RIT MSD d'avoir partagé votre projet et démontré l'importance du temps et de l'argent pour des projets concrets ! Pour en savoir plus sur le Rochester Institute of Technology , n'hésitez pas à consulter YouTube , Facebook et Instagram ! Pour toute question concernant nos actionneurs linéaires électriques ou pour discuter de nos autres produits, n'hésitez pas à nous contacter ! Experts dans notre domaine, nous serons ravis de vous aider.
sales@progressiveautomations.com | 1-800-676-6123