



Cet article vous guide dans le calcul de la force d'un actionneur nécessaire pour soulever efficacement la charge de votre application. Plusieurs facteurs entrent en jeu pour déterminer la force adéquate, notamment la charge, l'angle de poussée et sa taille.
Montage droit ou montage incliné
La direction de la force exercée par l'actionneur linéaire détermine le calcul à effectuer. L'actionneur peut être monté verticalement ou en biais. Nous présentons ci-dessous les deux configurations et la méthode de calcul de la force de l'actionneur linéaire dans chaque cas.
Monté à la verticale
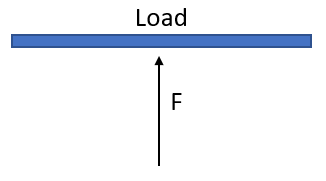
Pour calculer la force de poussée-traction d'un actionneur monté verticalement, la force nominale de l'actionneur doit être égale au poids requis. Cependant, par mesure de sécurité, il est toujours conseillé d'opter pour un actionneur dont la force est supérieure à celle de la charge. Ceci est dû au frottement et à d'autres facteurs qui peuvent augmenter la force requise pour déplacer la charge. Comme illustré ci-dessous, par exemple, si la charge est de 22,7 kg, la force nominale (F) de l'actionneur doit être supérieure à 22,7 kg.
Monté à un angle
Lorsque la charge et l'actionneur doivent être montés en biais, le calcul de la force exercée sur l'actionneur est considérablement modifié. Comme l'actionneur exerce une poussée en biais, il nécessite généralement une force supérieure à la charge réelle pour le soulever.
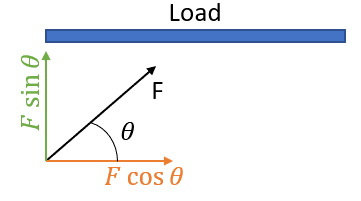
La figure ci-dessus illustre parfaitement les facteurs à prendre en compte lors du calcul de la force pour un montage incliné. Par exemple, si la charge pèse 22,5 kg et qu'elle est montée à un angle de 45° (θ) par rapport au sol, il faut s'assurer que la force perpendiculaire à la charge, F sinθ, est dans ce cas supérieure ou égale à 22,5 kg.

Cela signifie que si vous poussez une charge de 50 lb à un angle de 45°, vous aurez besoin d'une force d'actionneur linéaire capable de supporter une poussée d'au moins 71 lb.
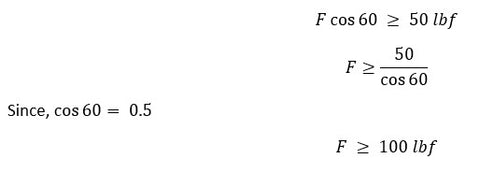
Alternativement, si vous prévoyez de pousser la charge latéralement et souhaitez la pousser à un angle de 60°, l'équation est la même, mais modifiée pour tenir compte de la direction dans laquelle la charge de votre application est poussée. Ceci est illustré dans l'image ci-dessous.
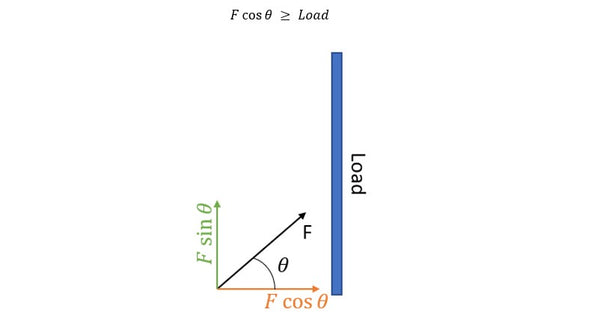
Vous utiliserez également la même méthode que celle indiquée précédemment, conformément à l’équation ci-dessous.
Dernier mot
En résumé, les équations mentionnées dans cet article représentent chaque scénario où le montage de votre actionneur linéaire est perpendiculaire à la charge. Utilisez ces calculs pour déterminer la force nominale requise pour votre actionneur, en vous assurant de ne jamais sous-estimer la valeur nécessaire. C'est une étape simple, mais elle peut vous faire gagner un temps précieux lors du choix de la force d'actionneur linéaire adaptée. Progressive Automations propose de nombreux guides et ressources pour vous aider à choisir l'actionneur linéaire adapté à votre application. Une fois la force sélectionnée, vous pouvez déterminer la course, la tension et les méthodes de contrôle à utiliser. Pour toute assistance supplémentaire concernant le choix d'un actionneur linéaire adapté à votre application, appelez-nous au 1-800-676-6123 ou envoyez-nous un e-mail à sales@progressiveautomations.com .